Introduction
L’usage des robots humanoïdes dans la restauration collective, la restauration commerciale et l’hôtellerie s’accélère. Robots cuisiniers, robots serveurs et robots réceptionnistes transforment progressivement l’expérience des clients, tout en répondant à des enjeux managériaux tels que la pénurie de main-d’œuvre, la standardisation du service, la productivité ou encore l’amélioration de la sécurité alimentaire (Ivanov & Webster, 2019).
Pour autant, l’adoption par les consommateurs n’est pas automatique. Les difficultés rencontrées par des initiatives pionnières, comme celles du Henn-na Hotel au Japon, contraint de remplacer une partie de ses robots jugés inefficaces ou anxiogènes, illustrent le risque d’un décalage entre innovation technologique et acceptation client (Yen, 2019). Comprendre dans quelles conditions les consommateurs acceptent ou refusent ces robots constitue donc un enjeu stratégique pour les organisations de service.
Ce travail de recherche vise à analyser les déterminants de l’intention des consommateurs d’accepter un robot humanoïde dans trois contextes :
- 🍳 Restauration collective : accepter de consommer un repas préparé par un robot cuisinier
- 🍽️ Restauration hôtelière : accepter d’être servi par un robot de service en salle
- 🏨 Hôtellerie : accepter d’être accueilli par un robot réceptionniste
La littérature scientifique identifie plusieurs catégories de facteurs influençant l’acceptation des robots de service : les caractéristiques perçues du robot (anthropomorphisme, chaleur, compétence), les perceptions socio-émotionnelles (présence sociale, plaisir), les évaluations fonctionnelles (utilité et facilité d’interaction), les perceptions de risque (performance, psychologique, social, confidentialité), ainsi que des médiateurs clés tels que la confiance et l’attitude (Mende et al., 2019 ; Blut et al., 2021 ; Song & Kim, 2022 ; Lu et al., 2019 ; Tussyadiah et al., 2020).
En nous appuyant sur la méta-analyse de l’anthropomorphisme dans les services (Blut et al., 2021), sur des modèles d’acceptation des robots dans l’hôtellerie tels que le Service Robot Acceptance Model (Fuentes-Moraleda et al., 2020) et le Hotel Robot Acceptance Model (Ren et al., 2025), ainsi que sur les travaux récents en marketing des services robotisés (Mende et al., 2019 ; Song & Kim, 2022), nous proposons un modèle intégratif de l’intention d’accepter un robot humanoïde dans ces trois contextes de service.
Cadre théorique
1. Anthropomorphisme et perceptions sociales
L’anthropomorphisme perçu renvoie à la tendance à attribuer à un robot des caractéristiques humaines – intentions, émotions, personnalité (Epley, Waytz & Cacioppo, 2007). Dans les services, un robot plus anthropomorphe est perçu comme un véritable agent social, susceptible de comprendre les attentes des clients et d’y répondre de façon appropriée. Cette humanisation influence directement les jugements de compétence et de chaleur : un robot qui ressemble davantage à un humain semble à la fois plus capable de réaliser les tâches attendues et plus apte à interagir de manière bienveillante (Blut et al., 2021 ; Mende et al., 2019).
L’anthropomorphisme renforce également la présence sociale du robot, c’est-à-dire la perception d’être en interaction avec « quelqu’un » plutôt qu’avec un dispositif purement technique. Des travaux récents en robotique de service montrent qu’un degré plus élevé d’anthropomorphisme accroît cette impression de présence sociale et encourage l’engagement des clients dans l’interaction (van Doorn et al., 2017 ; Song & Kim, 2022).
2. Perceptions socio-émotionnelles : chaleur, compétence, présence sociale et plaisir
2.1. Chaleur, compétence et confiance
Les travaux sur le Stereotype Content Model appliqués aux robots montrent que les individus évaluent les robots de service selon leur chaleur (amabilité, bienveillance) et leur compétence (capacité, efficacité) (Mende et al., 2019). Des robots jugés compétents sont perçus comme capables d’exécuter le service de manière fiable, ce qui favorise la confiance. De la même manière, lorsque le robot est perçu comme chaleureux et bien intentionné, les clients ont davantage tendance à lui faire confiance pour les servir ou gérer des interactions impliquant des données personnelles (Blut et al., 2021).
2.2. Présence sociale, chaleur et expérience hédonique
La présence sociale traduit le sentiment d’être réellement en présence d’un partenaire d’interaction. Lorsqu’un robot donne cette impression, l’échange est vécu comme plus riche, plus engageant et moins mécanique (Song & Kim, 2022). La chaleur perçue renforce également le confort relationnel et contribue à générer des émotions positives.
Ensemble, présence sociale et chaleur alimentent le plaisir d’interaction : les clients considèrent l’interaction avec le robot comme plus amusante, intéressante ou agréable (Yoganathan et al., 2021). Ce plaisir constitue une réponse affective centrale dans l’évaluation globale de l’expérience robotisée.
2.3. Plaisir d’interaction et attitude
Dans les modèles d’acceptation des technologies, la dimension hédonique joue un rôle clé : le plaisir d’utilisation est un prédicteur direct de l’attitude et de l’intention d’usage (Venkatesh, Thong & Xu, 2012). Les études sur les robots d’hôtel confirment que plus l’interaction est jugée plaisante, plus l’attitude envers les robots est favorable (Ren et al., 2025). On peut donc s’attendre à ce que les consommateurs qui éprouvent du plaisir à interagir avec un robot cuisinier, serveur ou réceptionniste développent une attitude positive vis-à-vis de l’utilisation de ce type de robot.
3. Perceptions fonctionnelles : facilité d’interaction, utilité perçue et attitude
Les modèles Technology Acceptance Model (TAM) et UTAUT2 montrent que la facilité d’utilisation d’une technologie influence à la fois l’utilité perçue et l’évaluation globale que les individus en font (Venkatesh et al., 2012). Une technologie perçue comme simple, intuitive et peu coûteuse en effort réduit la charge cognitive, facilite la prise en main et améliore le confort d’usage. Dans le cas des robots de service, une interaction fluide avec le robot conduit les clients à le considérer comme plus utile pour automatiser certaines tâches, gagner du temps ou améliorer la fiabilité du service, mais aussi comme plus acceptable et moins intimidant dans le cadre du service (Lu et al., 2019 ; Gursoy et al., 2019).
Parallèlement, l’utilité perçue demeure un déterminant central de l’attitude envers la technologie : plus les clients estiment qu’un robot cuisinier, un robot serveur ou un robot réceptionniste apporte un bénéfice concret (rapidité, cohérence du service, confort), plus leur attitude à l’égard de son usage est favorable (Lu et al., 2019 ; Ren et al., 2025). Dans notre modèle, la facilité d’interaction est donc susceptible d’améliorer l’attitude de deux façons complémentaires : directement, en rendant l’expérience d’usage plus confortable et moins anxiogène, et indirectement, en renforçant l’utilité perçue du robot.
4. Risque perçu, confiance et attitude
Le risque perçu constitue un frein majeur à l’adoption des robots de service. Dans le tourisme et l’hôtellerie, plusieurs formes de risque ont été observées : performance (peur d’erreurs ou de dysfonctionnements), psychologique (malaise, effet uncanny), social (crainte d’interactions embarrassantes) et confidentialité (inquiétudes quant à l’usage des données personnelles) (Tussyadiah et al., 2020 ; Pitardi et al., 2022).
Plus ces risques sont saillants, plus les clients hésitent à faire confiance au robot et développent des jugements prudents ou négatifs sur la pertinence de son usage dans le service. Le risque perçu est ainsi étroitement lié à une diminution de la confiance et à une dégradation de l’attitude envers les robots humanoïdes.
5. Confiance, attitude et intention d’acceptation
La confiance dans le robot correspond à la croyance qu’il exécutera le service de manière fiable, sûre et respectueuse des intérêts du client. Cette confiance résulte à la fois des perceptions sociales (chaleur, compétence, présence), des bénéfices fonctionnels et du niveau de risque ressenti (Lu et al., 2019 ; Qiu et al., 2020).
Lorsqu’elle est élevée, la confiance alimente une attitude favorable envers le recours au robot dans le service et renforce la probabilité que le consommateur accepte effectivement le robot. De manière cohérente avec les modèles du comportement planifié et de l’acceptation technologique, l’attitude constitue un prédicteur central de l’intention d’acceptation des robots de service (Venkatesh et al., 2012 ; Ren et al., 2025).
Hypothèses de recherche
Les hypothèses ci-dessous traduisent, sous forme testable, les relations représentées dans le modèle théorique.
H1 – Anthropomorphisme et perceptions sociales
H1a. Plus le robot est perçu comme anthropomorphe, plus sa compétence est évaluée positivement.
H1b. Plus le robot est perçu comme anthropomorphe, plus sa chaleur est évaluée positivement.
H1c. Plus le robot est perçu comme anthropomorphe, plus la présence sociale ressentie est élevée.
H2 – Chaleur, compétence et confiance
H2a. Une compétence perçue plus élevée du robot est associée à une confiance plus forte à son égard.
H2b. Une chaleur perçue plus élevée du robot est associée à une confiance plus forte à son égard.
H3 – Présence sociale, chaleur et plaisir d’interaction
H3a. Une présence sociale plus forte du robot est associée à un plaisir d’interaction plus élevé.
H3b. Une chaleur perçue plus forte du robot est associée à un plaisir d’interaction plus élevé.
H4 – Plaisir d’interaction et attitude
H4. Un plaisir d’interaction plus élevé conduit à une attitude plus favorable envers l’usage du robot dans le service.
H5 – Valeur fonctionnelle : facilité d’interaction, utilité perçue et attitude
H5a. Une facilité d’interaction plus élevée avec le robot est associée à une utilité perçue plus forte.
H5b. Une facilité d’interaction plus élevée avec le robot est associée à une attitude plus favorable envers son usage dans le service (préparation des repas, service en salle, accueil à la réception).
H5c. Une utilité perçue plus forte du robot est associée à une attitude plus favorable envers son usage dans le service.
H6 – Risque perçu, confiance et attitude
H6a. Un risque perçu plus élevé (performance, psychologique, social, confidentialité) est associé à une confiance plus faible dans le robot.
H6b. Un risque perçu plus élevé est associé à une attitude moins favorable envers l’usage du robot.
H7 – Confiance, attitude et intention
H7a. Une confiance plus élevée dans le robot est associée à une attitude plus favorable envers son usage.
H7b. Une confiance plus élevée dans le robot est associée à une intention plus forte d’accepter un robot humanoïde dans le service.
H7c. Une attitude plus favorable envers le robot est associée à une intention plus forte d’accepter son usage (robot cuisinier, serveur, réceptionniste).
Modèle théorique
Le modèle théorique opérationnalise ces relations en reliant l’anthropomorphisme aux perceptions sociales (compétence, chaleur, présence sociale), ces perceptions au plaisir d’interaction et à la confiance, la valeur fonctionnelle (facilité d’interaction et utilité perçue) à l’attitude, et le risque perçu à la confiance et à l’attitude. La confiance et l’attitude sont finalement reliées à l’intention d’accepter un robot humanoïde dans les trois contextes étudiés.
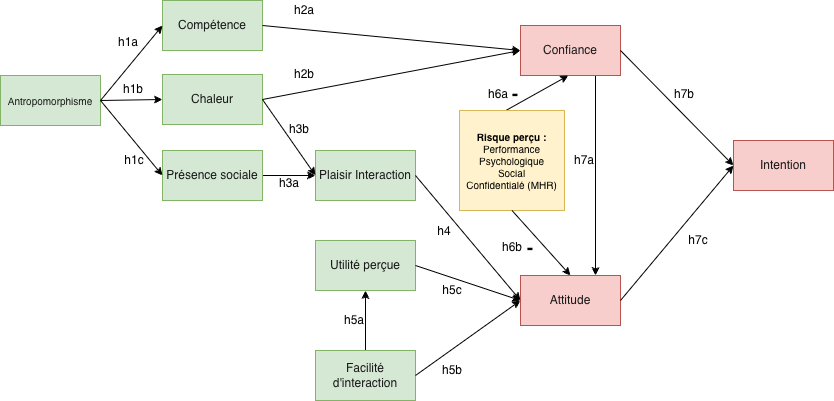
Figure – Modèle théorique de l’intention d’accepter un robot humanoïde cuisinier, serveur ou réceptionniste.
Références bibliographiques
Blut, M., Wang, C., Wünderlich, N. V., & Brock, C. (2021). Understanding anthropomorphism in service provision: A meta-analysis of physical robots, chatbots, and other AI. Journal of the Academy of Marketing Science, 49(4), 632–658.
Epley, N., Waytz, A., & Cacioppo, J. T. (2007). On seeing human: A three-factor theory of anthropomorphism. Psychological Review, 114(4), 864–886.
Fuentes-Moraleda, L., Díaz-Pérez, F., Orea-Giner, A., Coca-Pérez, J. L., & Muñoz-Mazón, A. (2020). Impact of virtual reality technology on the acceptance of robots in the hotel sector. International Journal of Hospitality Management, 89, 102435.
Gursoy, D., Chi, O. H., Lu, L., & Nunkoo, R. (2019). Consumers acceptance of artificially intelligent (AI) device use in service delivery. International Journal of Information Management, 49, 157–169.
Ivanov, S., & Webster, C. (2019). Robots, artificial intelligence, and service automation in travel, tourism and hospitality. In S. Ivanov & C. Webster (Eds.), Robots, Artificial Intelligence, and Service Automation in Travel, Tourism and Hospitality. Emerald Publishing.
Lu, L., Cai, R., & Gursoy, D. (2019). Developing and validating a service robot acceptance scale. International Journal of Hospitality Management, 80, 36–51.
Mende, M., Scott, M. L., Van Doorn, J., Grewal, D., & Shanks, I. (2019). Service robots rising: How humanoid robots influence service experiences and elicit compensatory responses. Journal of Marketing Research, 56(4), 535–556.
Pitardi, V., Wirtz, J., Paluch, S., & Kunz, W. (2022). Robots in hospitality and tourism: Understanding customers’ reactions. Journal of Hospitality Marketing & Management, 31(4), 395–420.
Qiu, H., Li, M., Shu, B., & Bai, B. (2020). Enhancing hospitality through technology: How service robots influence customer experiences. International Journal of Hospitality Management, 88, 102518.
Ren, S., Wang, J., & Huang, L. (2025). Tourist acceptance of service robots in hotels: Development and validation of the hotel robot acceptance model. Sustainability, 17(2), 809.
Song, C. S., & Kim, Y.-K. (2022). The role of human–robot interaction in consumers’ acceptance of humanoid retail service robots. Journal of Business Research, 146, 489–503.
Tussyadiah, I. P., Zach, F. J., & Wang, J. (2020). Do travelers trust intelligent service robots? Annals of Tourism Research, 81, 102886.
Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: Extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178.
Yen, J. (2019, 16 janvier). The hotel staffed by robots has fired half its robot workforce. The Guardian.
Yoganathan, V., Osburg, V. S., & Akhtar, P. (2021). Sensory stimulation and consumer responses to service robots. Technological Forecasting and Social Change, 167, 120706.
Les échelles de mesure
Anthropomorphisme perçu
Sources : Epley, N., Waytz, A., & Cacioppo, J. T. (2007). On seeing human: a three-factor theory of anthropomorphism. Psychological Review, 114(4), 864–886. ; Waytz, A., Morewedge, C. K., Epley, N., Monteleone, G., Gao, J.-H., & Cacioppo, J. T. (2010). Making sense by making sentient: effectance motivation increases anthropomorphism. Journal of Personality and Social Psychology, 99(3), 410–435. ; van Doorn, J., Mende, M., Noble, S. M., Hulland, J., Ostrom, A. L., Grewal, D., & Petersen, J. A. (2017). Domo arigato Mr. Roboto: emergence of automated social presence in organizational frontlines and customers’ service experiences. Journal of Service Research, 20(1), 43–58. ; Blut, M., Wang, C., Wünderlich, N. V., & Brock, C. (2021). Understanding anthropomorphism in service provision: a meta-analysis of physical robots, chatbots, and other AI. Journal of the Academy of Marketing Science, 49, 632–658.
- Ce robot me semble naturel dans son apparence globale.
- Ce robot paraît humain dans sa façon d’être plus que mécanique.
- Ce robot donne l’impression d’avoir une forme de personnalité.
- Ce robot me semble vivant plutôt qu’artificiel.
- Les mouvements de ce robot me paraissent fluides et naturels.
- Ce robot communique d’une manière qui semble humaine.
- Ce robot me donne l’impression de ressentir des émotions.
Chaleur perçue
Sources : Cuddy, A. J. C., Fiske, S. T., & Glick, P. (2008). Warmth and competence as universal dimensions of social perception: the stereotype content model and the BIAS map. Advances in Experimental Social Psychology, 40, 61–149. ; Fiske, S. T., Cuddy, A. J. C., Glick, P., & Xu, J. (2002). A model of (often mixed) stereotype content: competence and warmth respectively follow from perceived status and competition. Journal of Personality and Social Psychology, 82(6), 878–902. ; Mende, M., Scott, M. L., van Doorn, J., Grewal, D., & Shanks, I. (2019). Service robots rising: how humanoid robots influence service experiences and elicit compensatory consumer responses. Journal of Marketing Research, 56(4), 535–556. ; Pitardi, V., & Marriott, H. R. (2021). Alexa, she’s not human but… Unveiling the drivers of consumers’ trust in voice-based artificial intelligence. Psychology & Marketing, 38(4), 626–642.
- Ce robot me semble chaleureux dans son comportement.
- Ce robot donne l’impression d’être aimable.
- Ce robot paraît attentionné envers les clients.
- Ce robot semble bienveillant dans ses interactions.
- Ce robot donne l’impression de se soucier du bien-être des clients.
Compétence perçue
Sources : Cuddy, A. J. C., Fiske, S. T., & Glick, P. (2008). Warmth and competence as universal dimensions of social perception: the stereotype content model and the BIAS map. Advances in Experimental Social Psychology, 40, 61–149. ; Fiske, S. T., Cuddy, A. J. C., Glick, P., & Xu, J. (2002). A model of (often mixed) stereotype content: competence and warmth respectively follow from perceived status and competition. Journal of Personality and Social Psychology, 82(6), 878–902. ; Mende, M., Scott, M. L., van Doorn, J., Grewal, D., & Shanks, I. (2019). Service robots rising: how humanoid robots influence service experiences and elicit compensatory consumer responses. Journal of Marketing Research, 56(4), 535–556.
- Ce robot me semble compétent dans son travail.
- Ce robot paraît efficace dans la réalisation de ses tâches.
- Ce robot donne l’impression de bien maîtriser ses fonctions.
- Ce robot semble capable de gérer correctement les demandes des clients.
Présence sociale
Sources : van Doorn, J., Mende, M., Noble, S. M., Hulland, J., Ostrom, A. L., Grewal, D., & Petersen, J. A. (2017). Domo arigato Mr. Roboto: emergence of automated social presence in organizational frontlines and customers’ service experiences. Journal of Service Research, 20(1), 43–58. ; van Pinxteren, M. M. E., Wetzels, R. W. H., Rüger, J., Pluymaekers, M., & Wetzels, M. (2019). Trust in humanoid robots: implications for services marketing. Journal of Services Marketing, 33(4), 507–518. ; Song, H., & Kim, J. (2022). Service robots: How do anthropomorphism and presence influence consumer experience? Tourism Management, 91, 104537.
- Lors de l’interaction, j’ai l’impression d’être en présence d’un véritable être social.
- Ce robot donne l’impression d’une réelle présence « en face de moi ».
- Interagir avec ce robot ressemble à une interaction avec une personne dans la même pièce.
- Je sens une présence sociale lorsque j’interagis avec ce robot.
Plaisir d’interaction
Sources : Davis, F. D., Bagozzi, R. P., & Warshaw, P. R. (1992). Extrinsic and intrinsic motivation to use computers in the workplace. Journal of Applied Social Psychology, 22(14), 1111–1132. ; Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178. ; Song, H., & Kim, J. (2022). Service robots: How do anthropomorphism and presence influence consumer experience? Tourism Management, 91, 104537. ; Ren, L., Qiu, H., Park, J.-Y., & Xu, H. (2025). Human-robot interaction in tourism and hospitality: A systematic review and future research agenda. Tourism Management, 93, 104589.
- Interagir avec ce robot serait agréable.
- Interagir avec ce robot serait plaisant.
- Je pense que l’interaction avec ce robot serait divertissante.
- Je me sentirais bien en interagissant avec ce robot.
Facilité d’interaction
Sources : Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Quarterly, 13(3), 319–340. ; Venkatesh, V., Morris, M. G., Davis, G. B., & Davis, F. D. (2003). User acceptance of information technology: Toward a unified view. MIS Quarterly, 27(3), 425–478.
- Interagir avec ce robot serait facile pour moi.
- Je trouve que l’utilisation de ce robot serait simple.
- Apprendre à interagir avec ce robot me semblerait facile.
- Je pense que l’interface de ce robot serait claire et compréhensible.
Utilité perçue
Sources : Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Quarterly, 13(3), 319–340. ; Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178.
- L’utilisation de ce robot améliorerait la qualité du service à la réception.
- Ce robot permettrait de gagner du temps lors des arrivées et départs des clients.
- Ce robot faciliterait la gestion des demandes simples des clients.
- Ce robot apporterait un réel avantage au fonctionnement de l’hôtel.
Confiance
Sources : Lu, L., Cai, R., & Gursoy, D. (2019). Developing and validating a service robot integration willingness scale. International Journal of Hospitality Management, 80, 36–51.
- Je peux faire confiance à ce robot pour accomplir correctement ses tâches.
- Je me sentirais en sécurité en laissant ce robot gérer certaines demandes.
- Je pense que ce robot agit de manière fiable.
- De manière générale, je ferais confiance à ce robot dans un hôtel.
Confiance cognitive
Sources : McAllister, D. J. (1995). Affect- and cognition-based trust as foundations for interpersonal cooperation in organizations. Academy of Management Journal, 38(1), 24–59. ; Sirdeshmukh, D., Singh, J., & Sabol, B. (2002). Consumer trust, value, and loyalty in relational exchanges. Journal of Marketing, 66(1), 15–37.
- Je pense que ce robot est compétent dans ce qu’il fait.
- Je crois que ce robot possède les capacités nécessaires pour bien accomplir ses tâches.
- Je suis convaincu(e) que ce robot fournit des informations exactes.
- Globalement, je juge ce robot fiable sur le plan technique.
Confiance affective
Sources : McAllister, D. J. (1995). Affect- and cognition-based trust as foundations for interpersonal cooperation in organizations. Academy of Management Journal, 38(1), 24–59.
- Je me sentirais à l’aise émotionnellement en interagissant avec ce robot.
- Je pense que je pourrais compter sur ce robot dans des situations délicates.
- Je me sentirais en confiance avec ce robot même dans des situations imprévues.
- Je serais serein(e) à l’idée de laisser ce robot gérer des interactions avec les clients.
Attitude
Sources : Davis, F. D., Bagozzi, R. P., & Warshaw, P. R. (1992). Extrinsic and intrinsic motivation to use computers in the workplace. Journal of Applied Social Psychology, 22(14), 1111–1132. ; Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178.
- Pour moi, utiliser un robot de réception dans un hôtel est une bonne idée.
- Je trouve positif le fait d’avoir un robot réceptionniste.
- Globalement, je suis favorable à l’utilisation de ce type de robot dans les hôtels.
- Je pense qu’intégrer un robot à la réception est une initiative intéressante.
Intention
Sources : Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178. ; Lu, L., Cai, R., & Gursoy, D. (2019). Developing and validating a service robot integration willingness scale. International Journal of Hospitality Management, 80, 36–51.
- Si j’en ai l’occasion, j’accepterai volontiers d’interagir avec un robot à la réception d’un hôtel.
- Je choisirais volontiers un hôtel qui utilise ce type de robot.
- Je serais prêt(e) à essayer un service de réception géré en partie par un robot.
- Il est probable que je séjourne dans un hôtel qui utilise un robot réceptionniste.
Risque fonctionnel
Sources : Featherman, M. S., & Pavlou, P. A. (2003). Predicting e-services adoption: a perceived risk facets perspective. International Journal of Human-Computer Studies, 59(4), 451–474.
- J’ai peur que ce robot ne fonctionne pas correctement.
- Je crains que ce robot fasse des erreurs dans la gestion des réservations.
- J’ai des doutes quant à la fiabilité technique de ce robot.
- Je crains que ce robot tombe en panne à un moment important.
Risque psychologique / uncanny valley
Sources : Pitardi, V., Wirtz, J., Paluch, S., & Kunz, W. (2024). Surviving the uncanny valley in frontline services encounters: consumer responses to service robots’ human-likeness. Journal of Service Research, à paraître.
- Ce robot me met un peu mal à l’aise.
- Je trouve ce robot légèrement inquiétant.
- Quelque chose dans l’apparence ou le comportement de ce robot me dérange.
- Ce robot me donne une impression un peu « étrange ».
Risque confidentialité
Sources : Featherman, M. S., & Pavlou, P. A. (2003). Predicting e-services adoption: a perceived risk facets perspective. International Journal of Human-Computer Studies, 59(4), 451–474. ; Qiu, H., Li, M., Shu, B., & Bai, B. (2020). Enhancing hospitality experience with service robots: the mediating role of customer–robot engagement. International Journal of Hospitality Management, 88, 102518.
- Je crains que les données me concernant collectées par ce robot ne soient pas suffisamment protégées.
- J’ai peur que mes informations personnelles soient mal utilisées si je les donne à ce robot.
- Je m’inquiète de la confidentialité des données échangées avec ce robot.
- Je crains que ce robot ne mémorise trop d’informations sur moi.
Anxiété d’interaction
Sources : Meuter, M. L., Ostrom, A. L., Bitner, M. J., & Roundtree, R. (2003). The influence of technology anxiety on consumer use and experiences with self-service technologies. Journal of Business Research, 56(11), 899–906.
- Je me sentirais tendu(e) à l’idée d’interagir avec ce robot.
- Je suis inquiet(-ète) à l’idée de devoir utiliser ce robot.
- Je crains de ne pas savoir comment me comporter face à ce robot.
- Interagir avec ce robot me rendrait nerveux(-se).
- Je redoute de commettre une erreur qui perturberait le fonctionnement de ce robot.
- Le comportement de ce robot me semble difficile à anticiper.
- Je trouve l’interaction avec ce robot intimidante.
Anxiété liée à la compréhension
Sources : Meuter, M. L., Ostrom, A. L., Bitner, M. J., & Roundtree, R. (2003). The influence of technology anxiety on consumer use and experiences with self-service technologies. Journal of Business Research, 56(11), 899–906.
- Je ne comprends pas vraiment comment ce robot fonctionne.
- Les explications concernant ce robot me paraissent compliquées.
- Je me sens un peu perdu(e) face au fonctionnement de ce robot.
Manque d’aisance interactionnelle
Sources : Meuter, M. L., Ostrom, A. L., Bitner, M. J., & Roundtree, R. (2003). The influence of technology anxiety on consumer use and experiences with self-service technologies. Journal of Business Research, 56(11), 899–906.
- J’hésite à interagir avec ce robot par peur que cela se passe mal.
- Je crains que ce robot réagisse de manière imprévisible.
Aisance psychologique (inversés)
Sources : Meuter, M. L., Ostrom, A. L., Bitner, M. J., & Roundtree, R. (2003). The influence of technology anxiety on consumer use and experiences with self-service technologies. Journal of Business Research, 56(11), 899–906.
- Je me sens suffisamment à l’aise pour interagir avec ce robot.
- Je suis confiant(e) dans ma capacité à gérer une interaction avec ce robot.
- Je pense pouvoir garder le contrôle lors d’une interaction avec ce robot.
Sécurité alimentaire perçue
Sources : Frewer, L. J., Shepherd, R., Sparks, P., & al. (1998). The public’s understanding of food risk issues and food risk messages. Food Policy, 23(3–4), 233–252. ; Rosati, S., & Saba, A. (2004). The perception of risks associated with food-related hazards and the perceived reliability of sources of information. International Journal of Food Science and Technology, 39(5), 491–500.
- Je pense que les aliments ou boissons servis dans un hôtel utilisant ce robot seraient sûrs.
- Je n’aurais pas d’inquiétude particulière concernant la sécurité sanitaire dans un hôtel qui utilise ce type de robot.
- Je fais confiance aux procédures de sécurité alimentaire d’un hôtel qui intègre ce robot.